ここまで文章のみで検討を進めてきましたが、ここで一旦システム構成を図に起こしておきたいと思います。
- 電源部
- ACアダプタから給電された電力を、マイコン用と線路/分岐器駆動用として
それぞれ5V/12Vに降圧・安定化する- 3.3Vが必要になる場合は、使用直前に5Vから降圧する
- 分岐器駆動用として、ACアダプタ直結のラインも設けるかも(12Vhigher)
- ACアダプタから給電された電力を、マイコン用と線路/分岐器駆動用として
- 制御部
- メインのSBC(シングルボードコンピュータ)とマイコンからなる
- SBCは各出力/センサ入力の情報を集約し制御する
また、制御リクエスト(ユーザからの指令)を受け、マイコンに信号を送る
- SBCとマイコン間の通信方式は未確定
- I2C/SPI…
- ドライバ部
- マイコンからの信号に応じて、出力電圧やタイミングを制御する
- 線路に対するドライバの場合、車両の在線状態の判断に用いるため電流検知を行う
- センサ部
- 各種センサの出力をマイコンに出力する
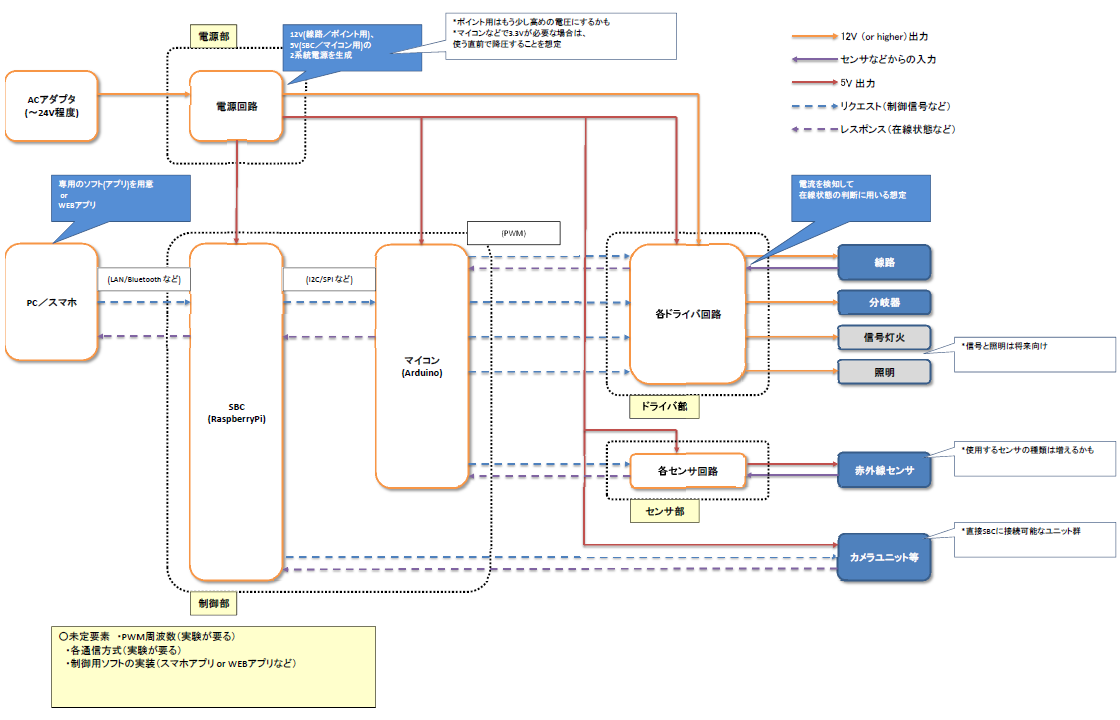
*上図では表現しきれてませんが、SBCとマイコン、マイコンとドライバ/センサ回路は1対N対応です